|
Hi there! I received my Ph.D. from Technical University of Munich (TUM) and the Institute of Robotic and Mechtronic (RM), German Aerospace Center (DLR). I was advised by Prof. Rudolph Triebel (DLR&KIT) and affiliated with Munich School of Data Science, where I worked with Prof. Stephan Günnemann. Recently, I am a senior research scientist at Agile Robots SE, investigating learning-based manipulation, e.g., vision-language-action models (VLAs), dexterous grapsing, etc.. In general, my research interests reside in the intersection of robotics and machine learning. A primary focus is on the trustworthy and adaptable learning ability of a robot in an open-world environment. Aiming to equip an autonomous agent with introspective capabilities i.e., uncertainty quantification/awareness of system internal states, I am passionate about investigating probabilistic machine learning on how to properly model/quantify it and leverage such information for learning-enabled robotics. P.S. The pronunciation of my first name "Jianxiang" is quite close to "Jensen" (yep, the well-known "Jensen inequality" often used in the Evidence Lower Bound (ELBO) derivation) but with a different ending :P. Jianxiang Feng received his PhD in robotics and machine learning from Technical University of Munich (TUM) and the Institute of Robotics and Mechatronics (RM), the German Aerospace Center (DLR) in 2024. Before he obtained his M.Sc in Electrical Engineering and Information Technology from TUM, 2019 and B.Sc in Electronic Engineering from Beijing University of Posts and Telecommunication (BUPT), 2015. His research interests reside in the intersection of robotics and machine learning. |

|
|
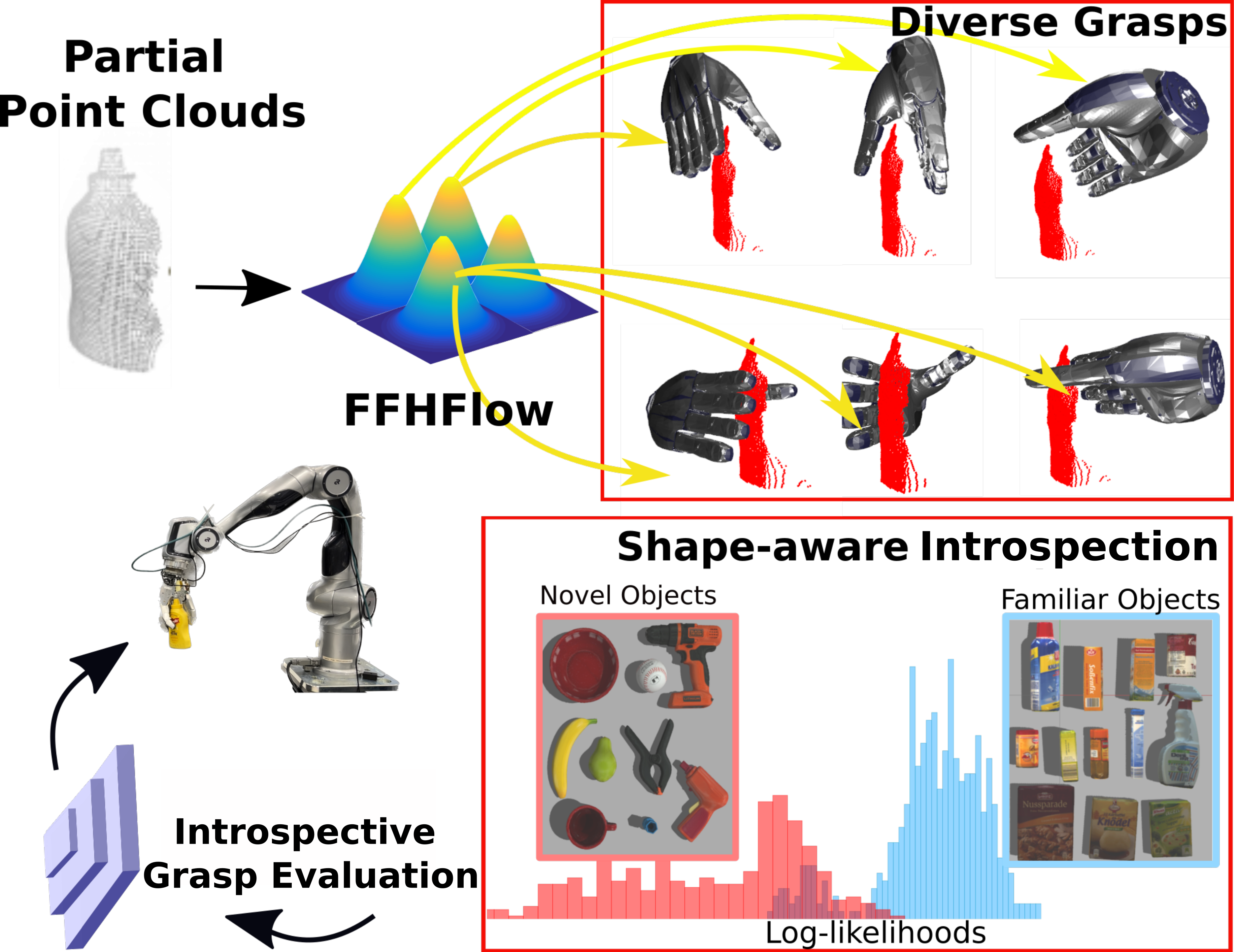
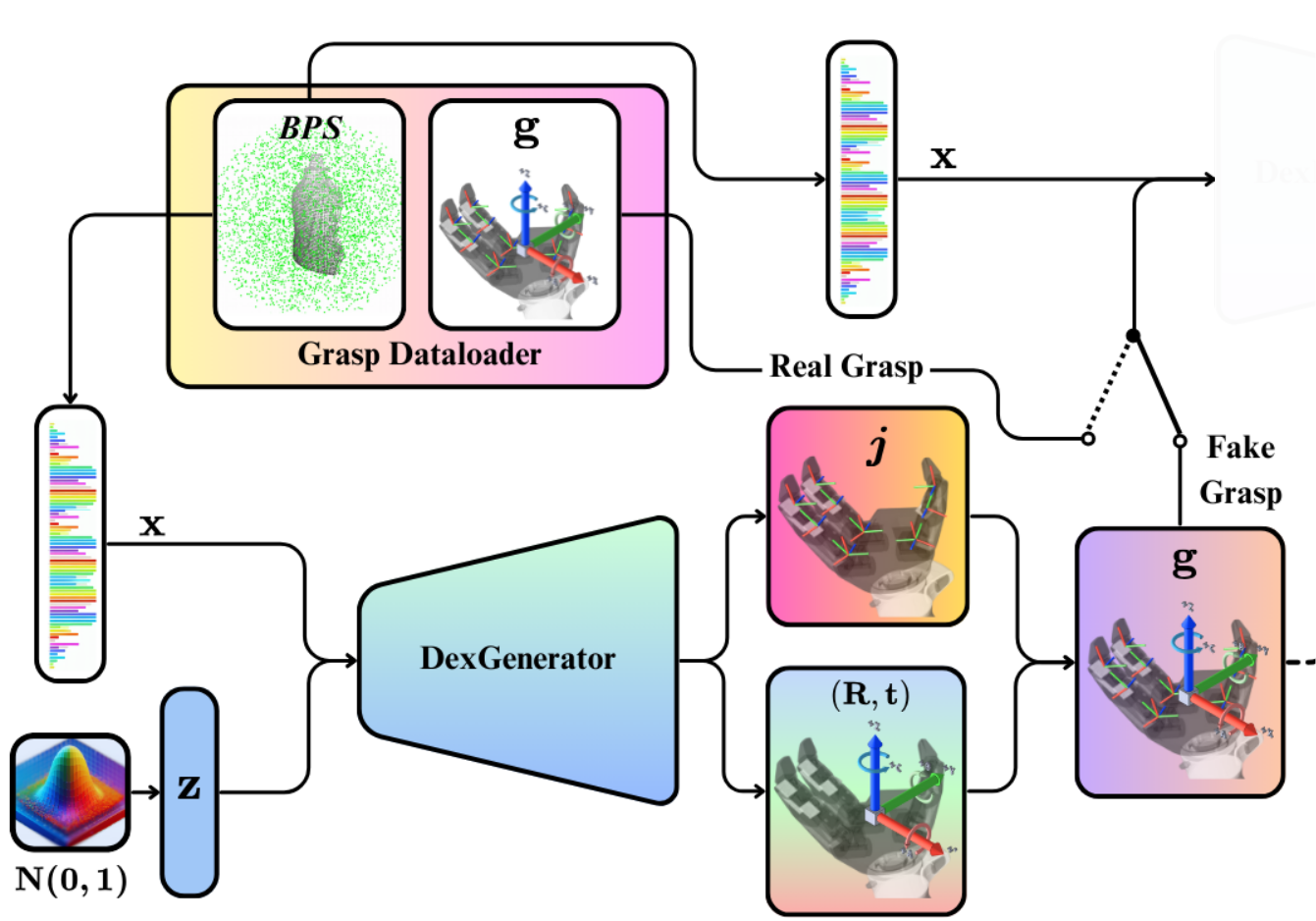
Jianxiang Feng*, Qian Feng*, Zhaopeng Chen, Rudolph Triebel, Alois Knoll, 9th Conference on Robot Learning (CoRL) 2025. arxiv / website A flow-based variational framework that generates diverse, robust multi-finger grasps while explicitly quantifying perceptual uncertainty in partial point clouds and itself. |
|
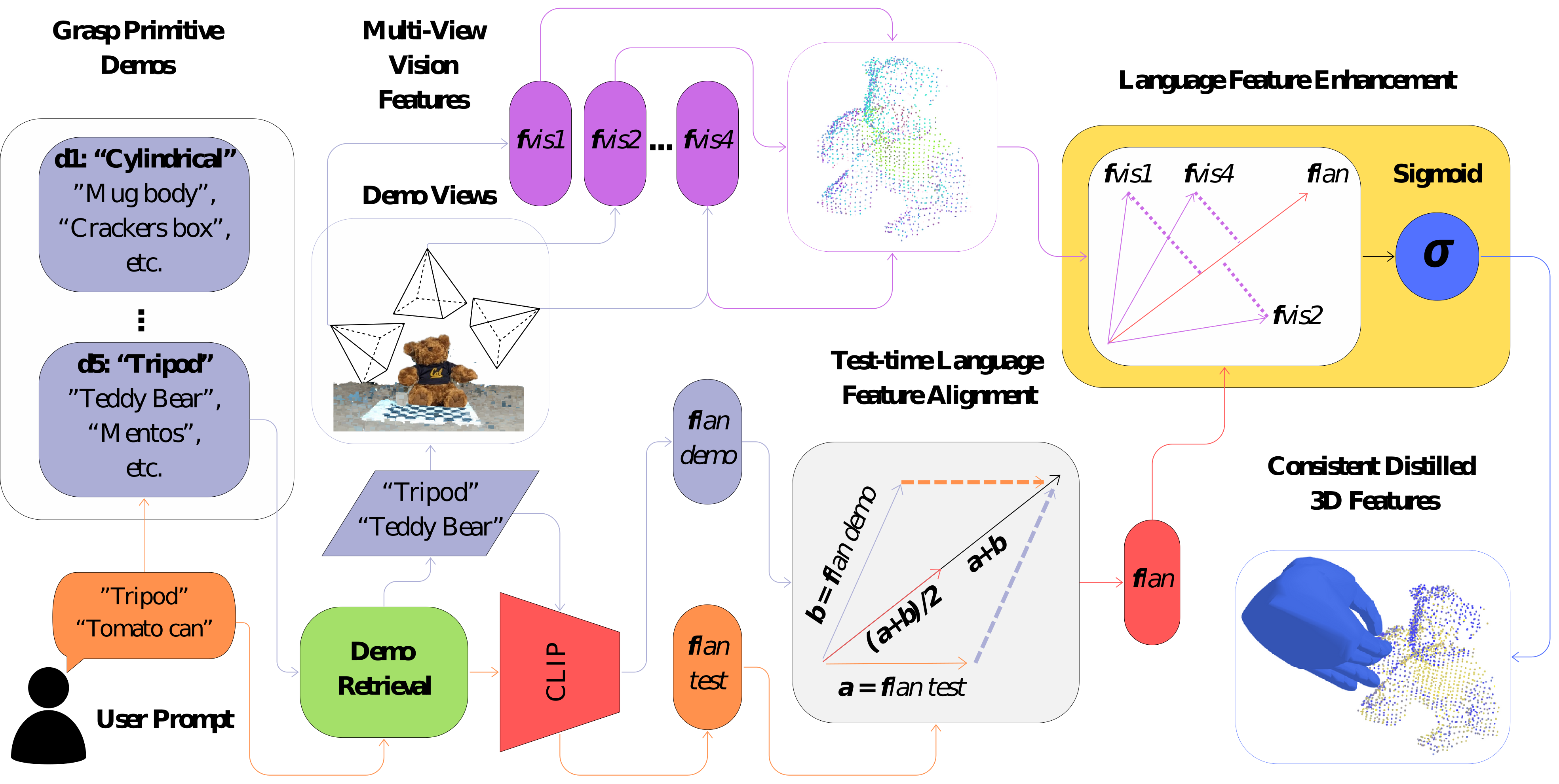
Qian Feng*, Alois Knoll*, S. Martinez Lema*, Zhaopeng Chen, Jianxiang Feng, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025. arxiv / video An efficient way to distill view-consistent 2D features onto 3D points based on the proposed language-enhanced feature fusion strategy, thereby enabling single-view few-shot generalization. |
|
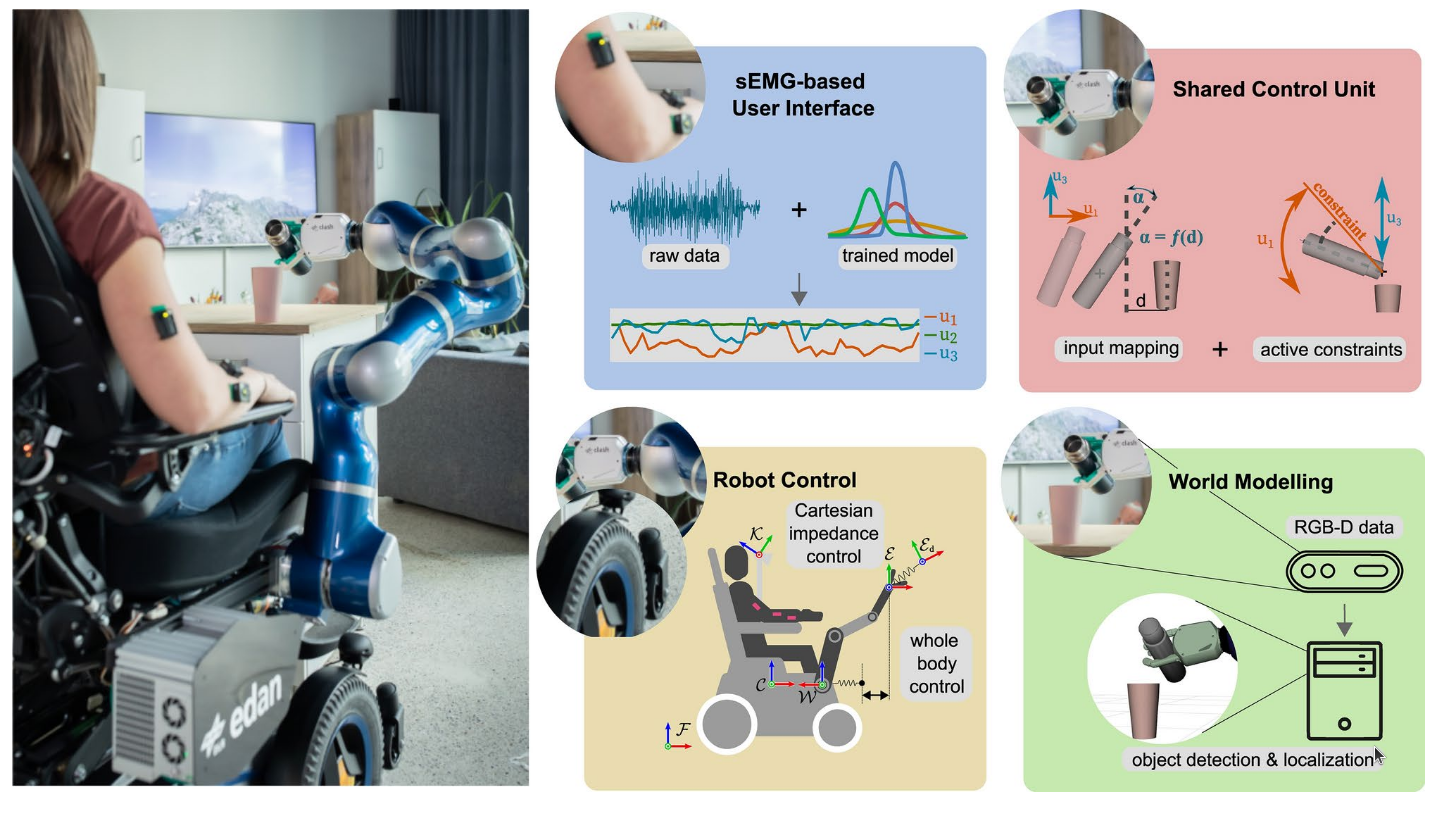
Annette Hagengruber, Gabriel Quere, Maged Iskandar, Samuel Bustamante, Jianxiang Feng, Daniel Leidner, Alin Albu-Schäffer, Freek Stulp, Jörn Vogel, Nature Portfolio Scientific Reports, 2025. paper A highly integrated assistive robot EDAN, operated by an interface based on bioelectrical signals, combined with shared control and a whole-body coordination of the entire system, through a case study involving people with motor impairments to accomplish real-world activities.. |
|
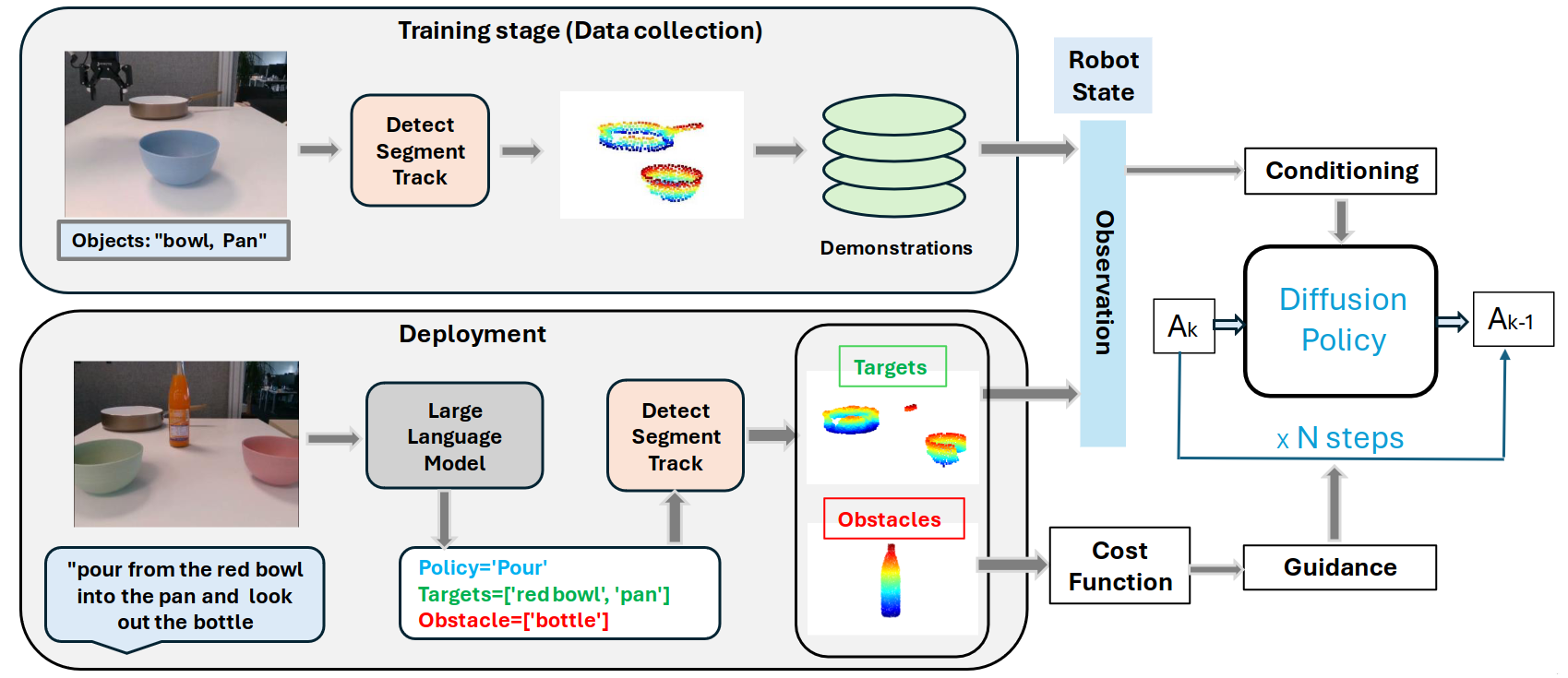
Hang Li, Qian Feng, Zhi Zheng, Jianxiang Feng, Alois Knoll, IEEE International Conference on Robotics and Automation (ICRA) 2025. Workshop on Semantics for Robotics: From Environment Understanding and Reasoning to Safe Interaction of Robotics, Robotics: Science and Systems (RSS-WS) 2024. arxiv / video A language-guided object-centric diffusion policy that takes a 3d representation of task-relevant objects as conditional input and can be guided by cost function for collision avoidance at inference time. |
|
Qian Feng*, S. Martinez Lema*, Mohammadhossein Malmir, Hang Li, Jianxiang Feng, Zhaopeng Chen, Alois Knoll, IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2024. website / arxiv / video A Conditional Generative Adversarial Networks (cGANs)-based DexGenerator to generate dexterous grasps and a discriminator-like DexEvalautor to assess the stability of these grasps. |
|
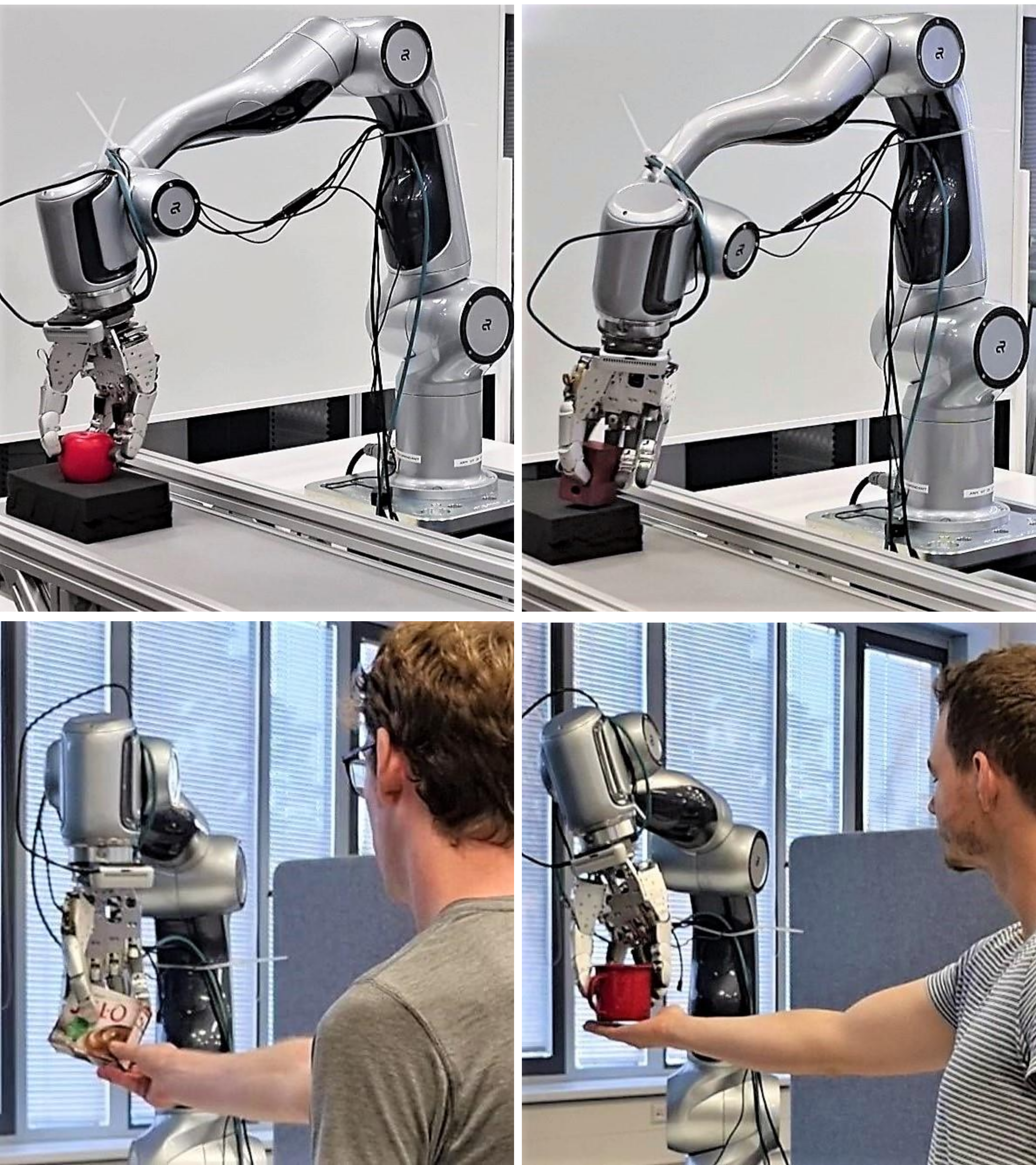
Yannick Burkhardt, Qian Feng, Jianxiang Feng, Karan Sharma, Zhaopeng Chen, Alois Knoll, IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2024. arxiv / video A dynamic grasping framework for unknown objects in this work, which uses a five-fingered hand with visual servo control and can compensate for external disturbances. |
|
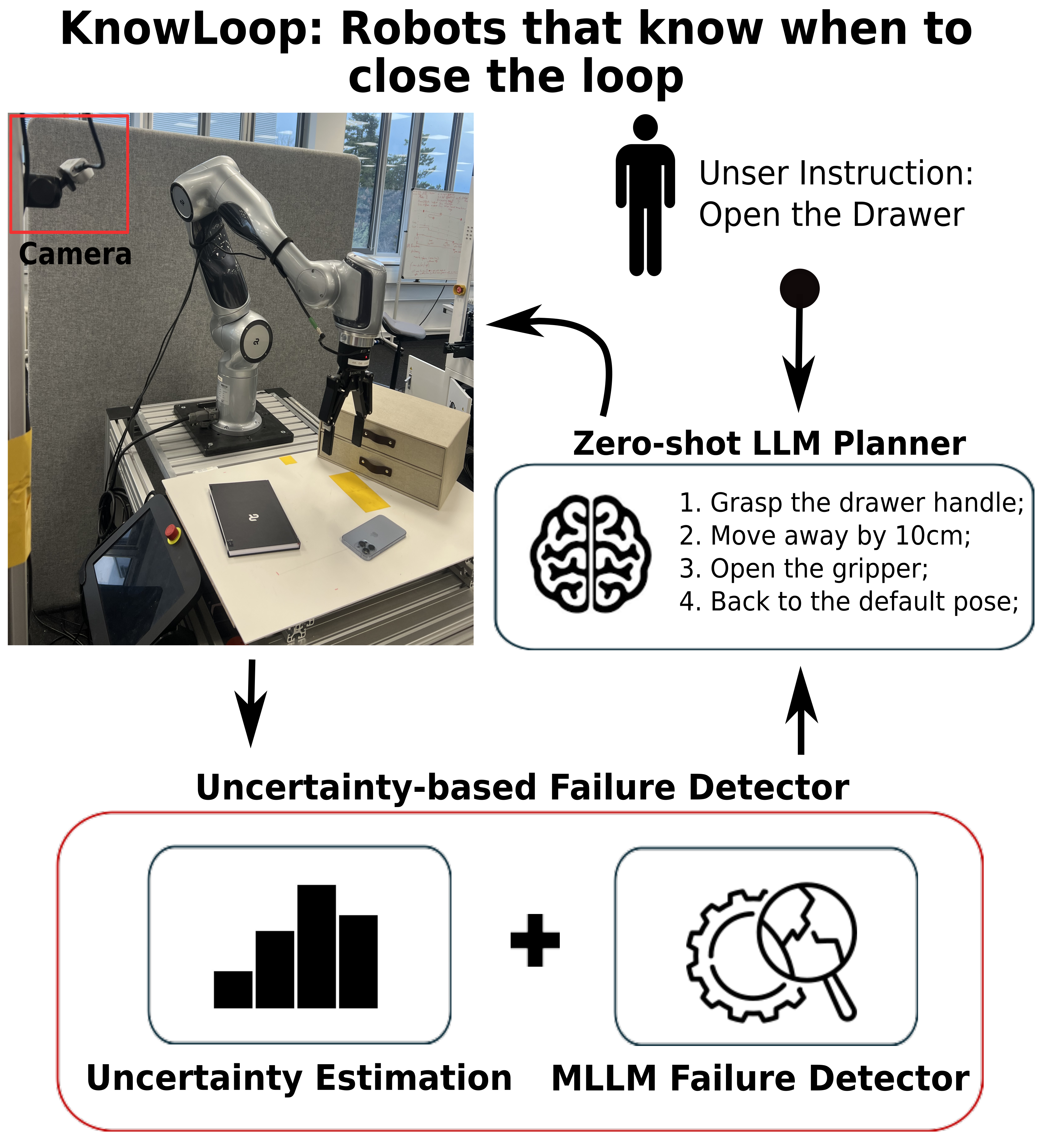
Zhi Zheng*, Qian Feng, Hang Li, Alois Knoll, Jianxiang Feng*, Workshop on Back to the Future: Robot Learning Going Probabilistic, IEEE International Conference on Robotics and Automation (ICRA) 2024. webiste / poster / arxiv / bibtex An initial attempt to investigate the effects of several uncertainty metrics on an VLM failure detector within a high-level LLM task planner. |

|
Jongseok Lee, Ribin Radhakrishna Balachandran , Konstantin Kondak, Andre Coelho, Marco De Stefano, Matthias Humt, Jianxiang Feng, Tamim Asfour, Rudolph Triebel, IEEE Transactions on Field Robotics, 2024. Field Robotics, 2023. video / bibtex A novel teleoperation system for advancing aerial manipulation in dynamic and unstructured environments based on pose estimation pipelines for the industrial objects of both known and unknown geometries and an active learning pipeline. |
|
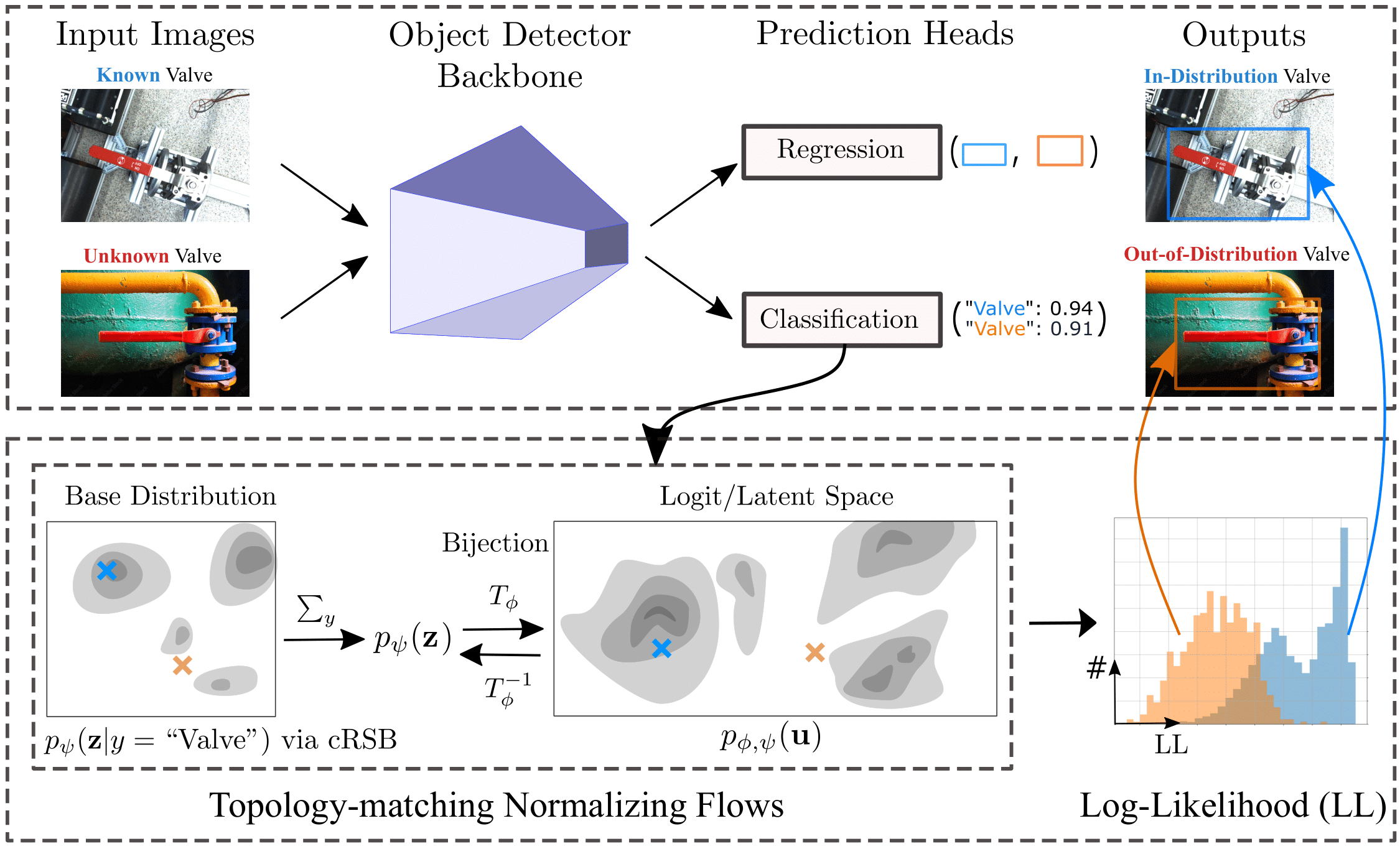
Jianxiang Feng, Jongseok Lee, Simon Geisler, Stephan Günnemann, Rudolph Triebel, 7th Conference on Robot Learning (CoRL) 2023. code / webiste / poster / spotlight presentation / bibtex A novel way to equip NFs with efficient but flexible base distributions to overcome the topological constraint for OOD detection in robot learning. |
|
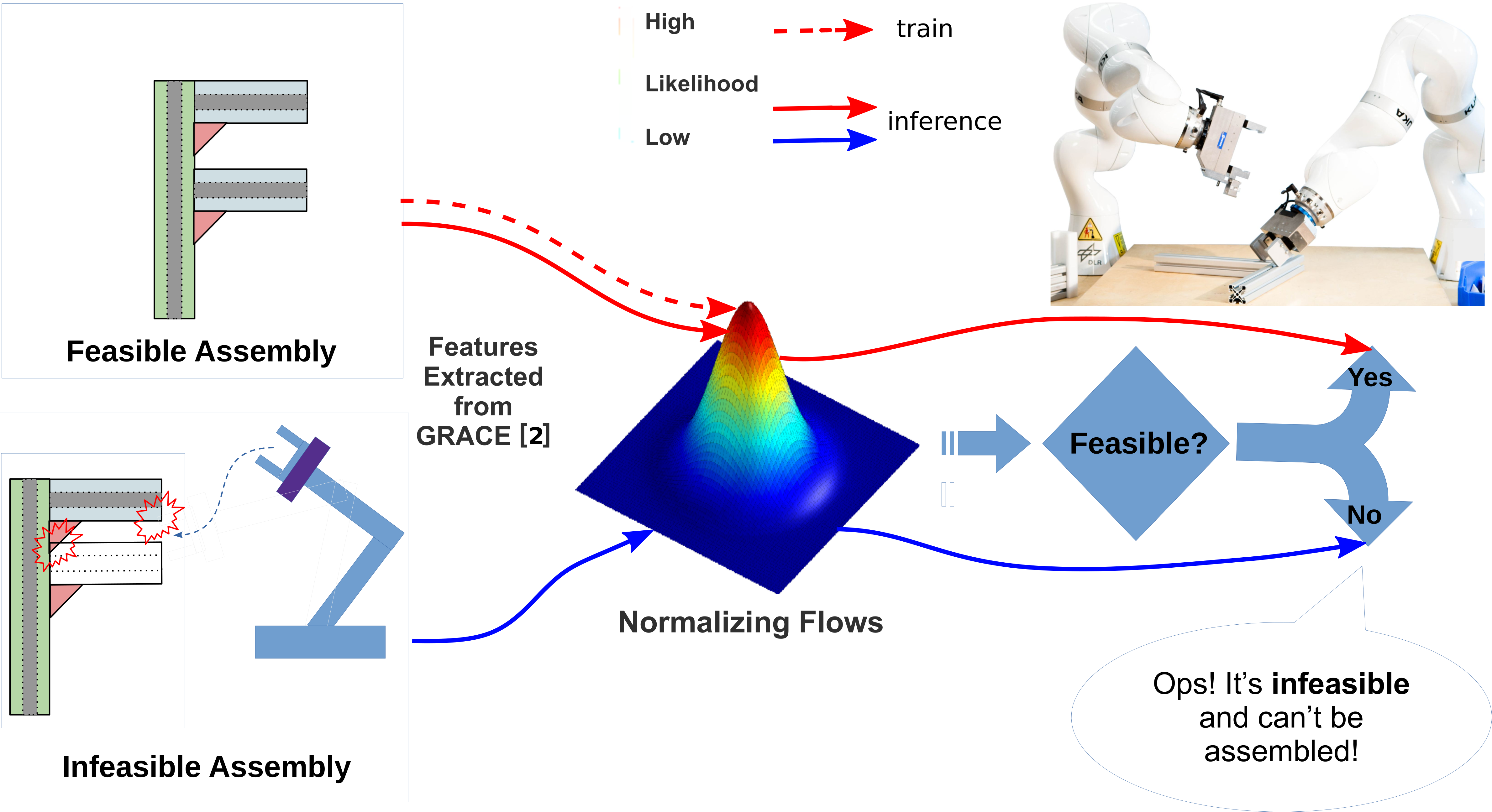
Jianxiang Feng, Matan Atad , Ismael Rodríguez, Maximilian Durner, Stephan Günnemann, Rudolph Triebel, Workshop on Robotics and AI: The Future of Industrial Assembly Tasks, Robotics: Science and Systems (RSS-WS) 2023. code / website / arxiv / presentation video / slides / bibtex A density-based method with normalizing flows for feasibility learning in Robotic Assembly based on only feasible examples. |
|
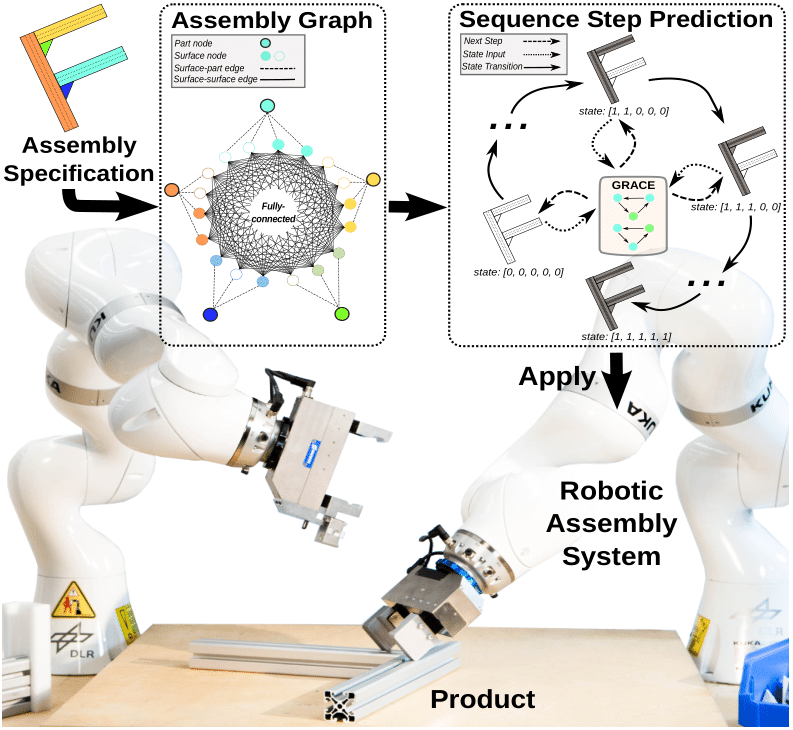
Jianxiang Feng*, Matan Atad *, Ismael Rodríguez, Maximilian Durner, Rudolph Triebel, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023. code / website / arXiv / bibtex A holistic graphical approach including a graph representation for product assemblies and a policy architecture, Graph Assembly Processing Network, dubbed GRACE to predict assembly sequences in a step-by-step manner. |
|
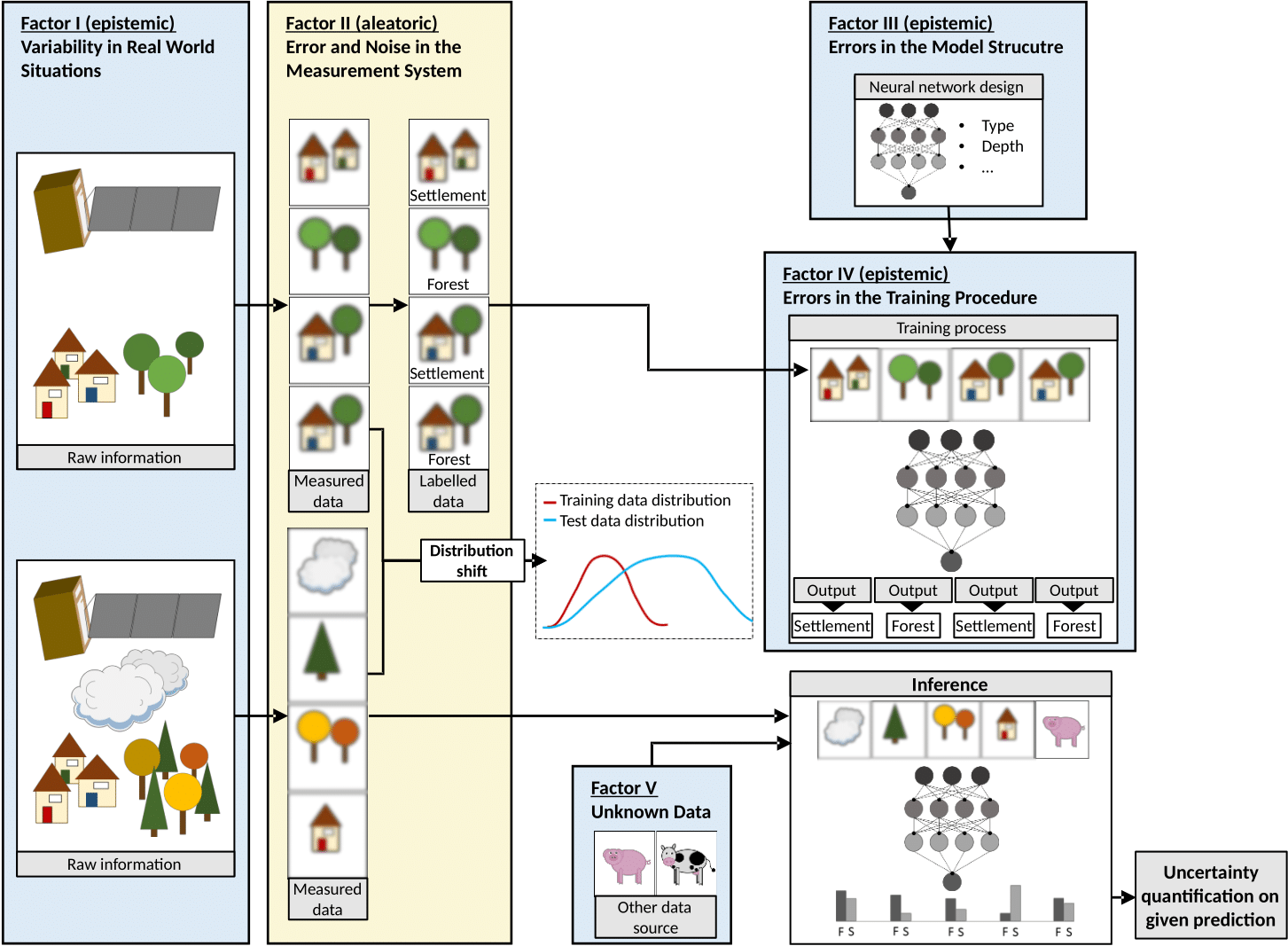
Jakob Gawlikowski, Cedrique Rovile Njieutcheu Tassi, Mohsin Ali, Jongseok Lee, Matthias Humt, Jianxiang Feng, Anna Kruspe, Rudolph Triebel, Peter Jung, Ribana Roscher, Muhammad Shahzad, Wen Yang, Richard Bamler, Xiaoxiang Zhu Artificial Intelligence Review 2023. arXiv / bibtex A comprehensive overview of uncertainty estimation in neural networks, reviewing recent advances in the field, highlighting current challenges, and identifying potential research opportunities. |
|
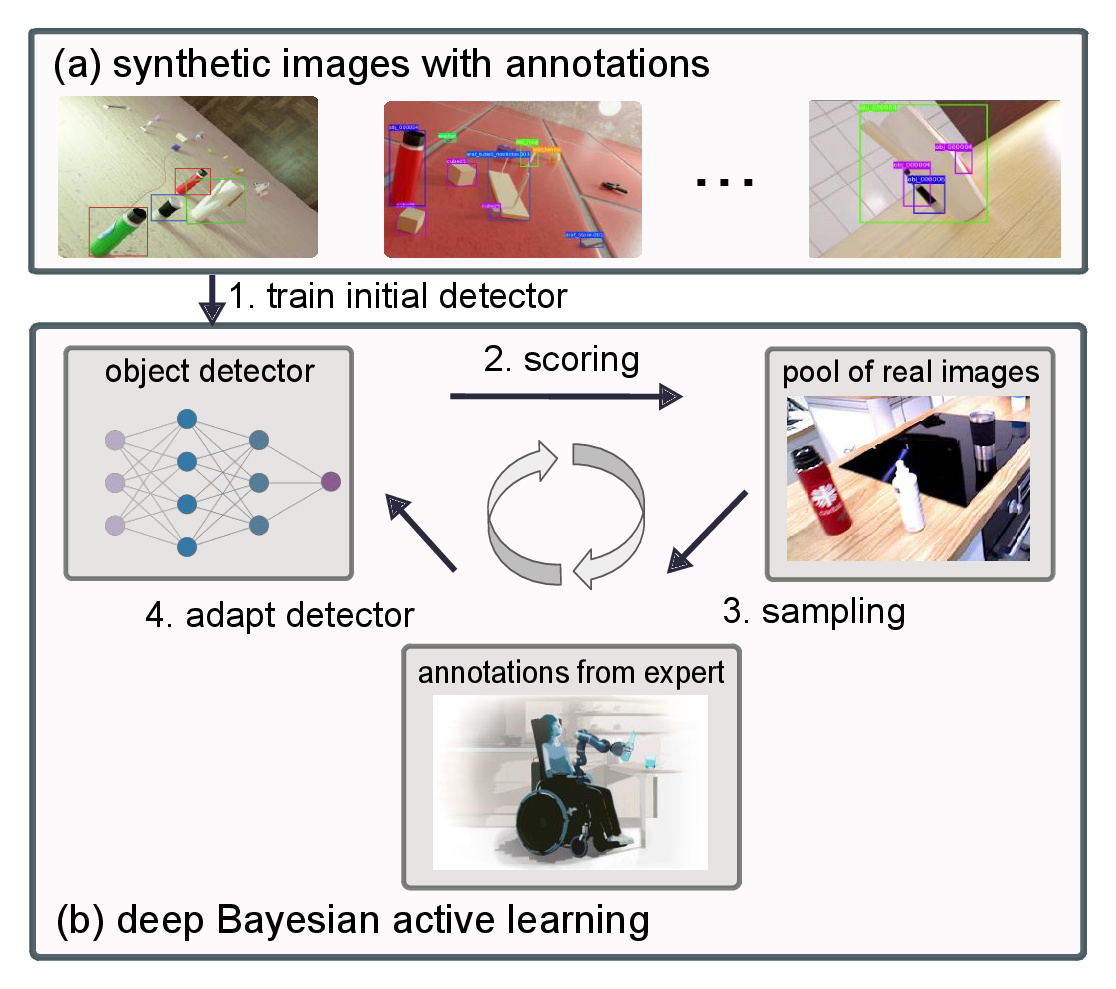
Jianxiang Feng, Jongseok Lee, Maximilian Durner, Rudolph Triebel, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022. code / website / arXiv / poster / slides / presentation video / demo video / bibtex An active learning pipeline to reduce annotation efforts of real data within a Sim-to-Real scenario based on deep Bayesian Neural Networks. |
|
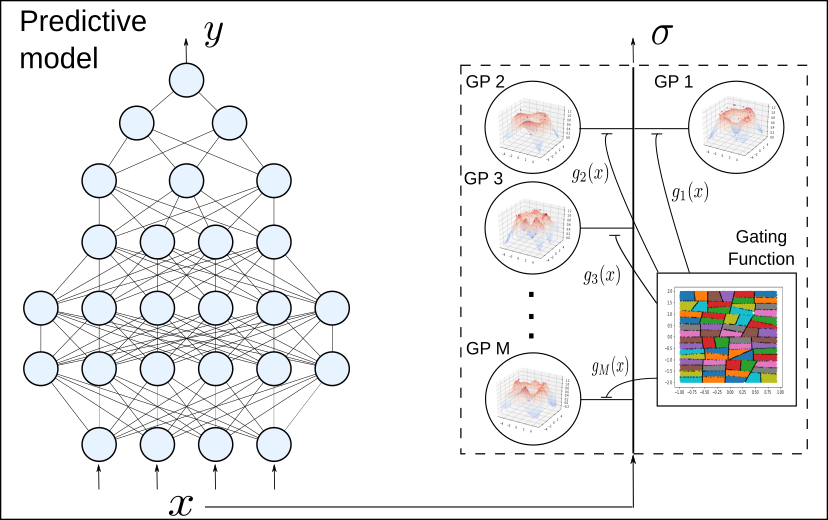
Jongseok Lee, Jianxiang Feng, Matthias Humt, Marcus G. Muller, Rudolph Triebel, 5th Conference on Robot Learning (CoRL) 2021. code / video / bibtex A probabilistic framework to obtain both reliable and fast uncertainty estimates for predictions with Deep Neural Networks (DNNs) based on Sparse Gaussian Processes. |
|
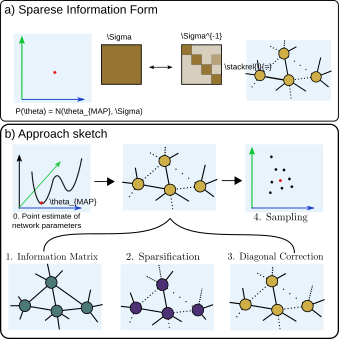
Jongseok Lee, Matthias Humt, Jianxiang Feng, Rudolph Triebel, International Conference on Machine Learning (ICML) 2020. code / bibtex A sparse representation of model uncertainty for Deep Neural Networks (DNNs) where the parameter posterior is approximated with an inverse formulation of the Multivariate Normal Distribution (MND), also known as the information form. |
|
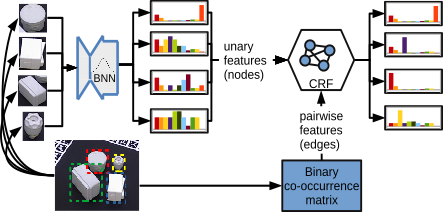
Jianxiang Feng, Maximilian Durner, Zoltán-Csaba Márton, Ferenc Bálint-Benczédi, Rudolph Triebel, The International Symposium of Robotics Research (ISRR) 2019. website / arXiv / bibtex A method for adaptive image classification based on fusing uncertainty estimates from Bayesian Neural Networks as unary potentials within a Conditional Random Field (CRF). |
Academic Services |
Conference/Journal Reviewer:
Workshop Organizer:
|
Events |
|
06.2023 Team player, the aerial manipulation demo for kuka inovation award 2023 in Automatica 2023 (press).03.2023 Team player, the 1st place in the discipline assist robot race of Cybathlon Challenge as part of EDAN team (press, video) |
Mentorship |
|
08.2023 Master Thesis Supervision at TUM: "Improving Sample Selection in Active Learning Using Graph Neural Networks" by Zhoumin Zhao, co-supervision with Simon Geisler.06.2023 Research Internship at DLR: "Automating Scene Graph Data Generation for Task and Motion Planning via Blenderproc" by Juan Diego Plaza Gomez, co-supervision with Samuel Bustamante and Dominik Winkelbauer.03.2023 Master Thesis Supervision at TUM: "Graph Neural Networks for Knowledge Transfer in Robotic Assembly Sequence Planning" by Matan Atad, co-supervision with Maximilian Durner, Ismael Rodriguezbrena.11.2022 Master Thesis Supervision at TUM: "Scene Graph Generation from Visual perception for Task and Motion Planning" by Mohit Kumar, co-supervision with Samuel Bustamante. |
Fun Moments and Hobbies |
|
Link to the template. Do not scrape the HTML from this page itself, as it includes analytics tags that you do not want on your own website — use the github code instead. Also, consider using Leonid Keselman's Jekyll fork of this page. |